

直流電機的調(diào)速范圍廣,過載能力比較強,可以實現(xiàn)頻繁的無級快速啟動、制動和反轉(zhuǎn),可以滿足生產(chǎn)過程中自動化系統(tǒng)各種不同的特殊運行要求,以下是幾個簡單的直流電機調(diào)速電路圖。
直流電機調(diào)速電路圖一
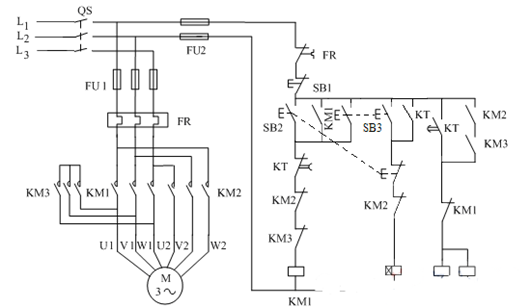
上圖中,合上電源開關(guān) QS ,按下 SB2 低速起動按鈕,接觸器 KM1 線圈得電并自鎖, KM1 的主觸點閉合,電動機 M 的繞組連接成△形并以低速運轉(zhuǎn)。由于 SB2 的動斷觸點斷開,時間繼電器線圈 KT 不得電。
按下高速起動按鈕SB3,接觸器 KM1 線圈得電并自鎖,電動機 M 連接成△形低速起動;
因為SB3 是復合按鈕,時間繼電器 KT 線圈同時得電吸合, KT 瞬時動合觸點閉合自鎖,經(jīng)過一定時間后, KT 延時動斷觸點分斷,接觸器KM1線圈失電釋放,KM1主觸點斷開,KT延時動合觸點閉合,接觸器KM2、KM3線圈得電并自鎖, KM2、KM3主觸點同時閉合,電動機 M 的繞組連接成 YY 形并以高速運行。
直流電機調(diào)速電路圖二
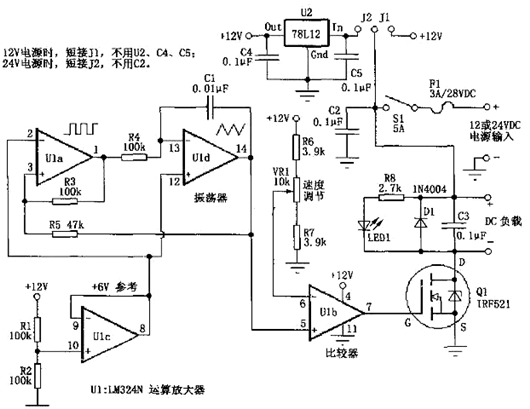
圖中,由U1a、U1d組成振蕩器電路,提供頻率約為400Hz的方波/三角形波。U1c產(chǎn)生6V的參考電壓作為振蕩器電路的虛擬地。這是為了振蕩器電路能在單電源情況下也能工作而不需要用正負雙電源。
U1b這里接成比較器的形式,它的反相輸入端(6腳)接入電阻R6、R7和VR1,用來提供比較器的參考電壓。這個電壓與U1d的輸出端(14腳)的三角形波電壓進行比較。
當該波形電壓高于U1b的6腳電壓.U1b的7腳輸出為高電平;反之,當該波形電壓低于U1b的6腳電壓,U1b的7腳輸出為低電平。由此我們可知,改變U1b的6腳電位使其與輸入三角形波電壓進行比較。
就可以增加或減小輸出方波的寬度,實現(xiàn)脈寬調(diào)制(PWM)。電阻R6、R7用于控制VR1的結(jié)束點,保證在調(diào)節(jié)VR1時可以實現(xiàn)輸出為全開(全速或全亮)或全關(guān)(停轉(zhuǎn)或全滅),其實際的阻值可能會根據(jù)實際電路不同有所改變。
D1是用來防止電機的反電動勢損壞Q1。 當使用24v的電源電壓時,圖1電路通過U2將24V轉(zhuǎn)換成12V供控制電路使用。而Q1可以直接在21v電源上,對于Q1來講這與接在12v電源上沒有什么區(qū)別。
直流電機調(diào)速電路圖三
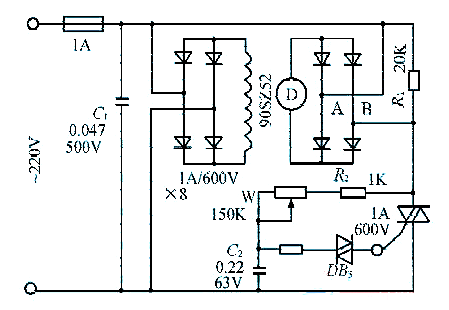
在AB兩端產(chǎn)生的被調(diào)電壓經(jīng)全波整流后供給電機的電樞繞組,調(diào)節(jié)W從而達到調(diào)速的目的。
全橋二極管雖有續(xù)流作用,但電機在轉(zhuǎn)速很低時仍將出現(xiàn)跳動。此時雙向可控硅導通時間相當短,在電機反電勢的影響下,已處于導通與截止的不穩(wěn)定臨界狀態(tài)。
解決辦法:設(shè)法降低雙向可控硅反電勢負載的影響,給電樞兩端并接假負載電阻,使可控硅在導通角小時也能正常工作。
此電阻的選擇應以消除電機低速跳動為準。給某一機床所用70W電機并接1k,電阻即可消除跳動。
但在電樞兩端并接電阻帶來功耗問題,在電機全壓高速運行時,電阻上的電壓幾乎達到220V,則電阻功耗達48.4W,這已達到了不能容忍的程度。
然后,將電阻并接在整流橋交流兩輸入端(即圖中的AB兩點),則電阻的功耗可大大降低。
同樣是70W電機,此時并接的電阻阻值達20k幾時也能有效地消除電機的跳動。此時,電阻在電機全壓高速運行時的最大功耗為2.4W。
〈烜芯微/XXW〉專業(yè)制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以直接聯(lián)系下方的聯(lián)系號碼或加QQ/微信,由我們的銷售經(jīng)理給您精準的報價以及產(chǎn)品介紹
聯(lián)系號碼:18923864027(同微信)
QQ:709211280