

PWM控制電機(jī)
(1)雙極模式,即電樞電壓極性是正負(fù)交替的,
優(yōu)點(diǎn):能正反轉(zhuǎn)運(yùn)行,啟動(dòng)快,調(diào)速精度高,動(dòng)態(tài)性能好,調(diào)速靜差小,調(diào)速范圍大,能加速,減速,剎車,倒轉(zhuǎn),能在負(fù)載超過設(shè)定速度時(shí),提供反向力矩,能克服電機(jī)軸承的靜態(tài)摩擦力,產(chǎn)生非常低的轉(zhuǎn)速。
缺點(diǎn):控制電路復(fù)雜。
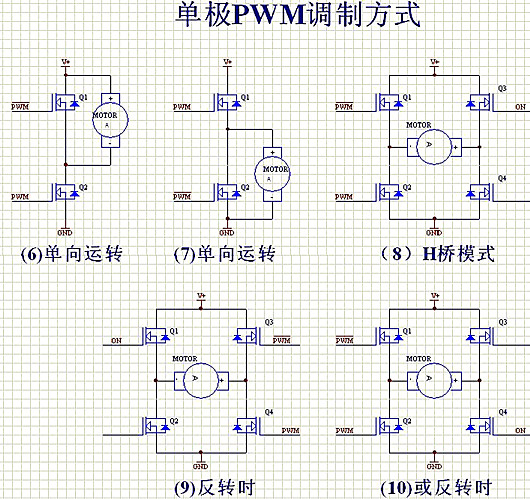
(2)單極模式,即電機(jī)電樞驅(qū)動(dòng)電壓極性是單一的
優(yōu)點(diǎn):?jiǎn)?dòng)快,能加速,剎車,能耗制動(dòng),能量反饋,調(diào)速性能不如雙極模式好,但是相差不多,電機(jī)特性也比較好。如果接成H橋模式,也能實(shí)現(xiàn)反轉(zhuǎn)。
在負(fù)載超速時(shí)也能提供反向力矩。
缺點(diǎn):剎車時(shí),不能減速到0,速度接近0速度時(shí)沒有制動(dòng)力。不能突然倒轉(zhuǎn)。動(dòng)態(tài)性能不好,調(diào)速靜差稍大。
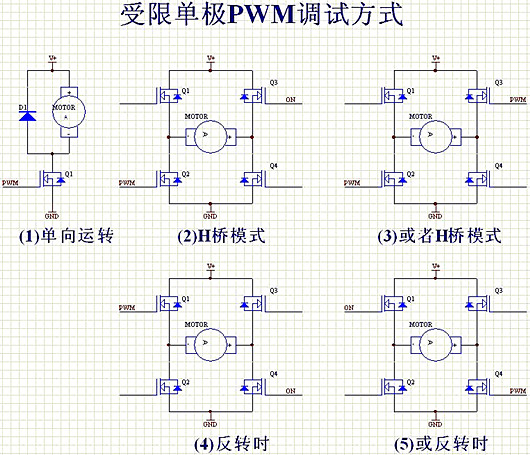
(3)受限單極模式,即除了單極調(diào)制外,能耗制動(dòng)通路受到了限制。
優(yōu)點(diǎn):控制電路簡(jiǎn)單,如果接成H橋模式,也能正反轉(zhuǎn)。
缺點(diǎn):不能剎車,不能能耗制動(dòng),在負(fù)載超過設(shè)定速度時(shí)不能提供反向力矩。
調(diào)速靜差大,調(diào)速性能很差,穩(wěn)定性也不好。
首先,這里的PWM和PWM 都是已經(jīng)經(jīng)過處理后,能直接驅(qū)動(dòng)功率管的信號(hào),而不是單片機(jī)輸出的PWM信號(hào)。
PWM 信號(hào)是和PWM信號(hào)互補(bǔ)的,邏輯上互補(bǔ),而不是電平的互補(bǔ)。
還有默認(rèn)這兩個(gè)信號(hào)已經(jīng)經(jīng)過了死區(qū)控制,不回產(chǎn)生同時(shí)導(dǎo)通的問題。
除了第一個(gè)圖外,功率管上必須并聯(lián)續(xù)流二極管,要么是MOS管里自帶的,要么就是BJT再并聯(lián)的,或者M(jìn)OS管并聯(lián)肖特基。
其實(shí)我們大家平時(shí)控制電機(jī)用的都是如圖1所示的那種樣子,這種模式叫受限單極調(diào)制,只有加速和調(diào)速功能,是沒有剎車功能的,電機(jī)速度下降靠負(fù)載摩擦,也沒有負(fù)力矩。
比如說,設(shè)定速度是50%,但是電機(jī)因?yàn)橥饬λ俣冗_(dá)到了60%了,電機(jī)也不會(huì)減速,只有電機(jī)速度超過100%時(shí),電機(jī)產(chǎn)生的反電動(dòng)勢(shì)超過了電源電壓,才會(huì)產(chǎn)生反向力矩,那個(gè)另當(dāng)別論。
像以前的有刷電動(dòng)自行車采用的就是這種控制方法,只能加速,不能減速,速度控制也不精確,但是足夠滿足要求了。
其次,我們想要電機(jī)實(shí)現(xiàn)正反轉(zhuǎn),也只不過是用到了圖2和圖4的樣子,這個(gè)雖然是接成了H橋的樣子,但是實(shí)際上還是受限單極調(diào)制,把圖2的Q4拿掉,Q1變成一個(gè)二極管,電路就又變成了圖1的樣子。其他的圖都同理。
單極調(diào)制和雙極調(diào)制
如果想得到有剎車的功能,就必須使用一個(gè)與PWM信號(hào)互補(bǔ)的PWM信號(hào)。
這個(gè)信號(hào)在PWM關(guān)斷期間,為電機(jī)提供一個(gè)續(xù)流通道,相當(dāng)于開關(guān)電源的同步續(xù)流吧,也有稱之為同步整流。
按道理,那個(gè)二極管也能提供續(xù)流通道如圖6中的Q1,但是用MOS管作為續(xù)流通道有2個(gè)好處,第一,導(dǎo)通壓降低,比二極管發(fā)熱更少,效率更高,第二,二極管上不能產(chǎn)生反向電流,而MOS管可以通過反向電流
其實(shí)二極管的反向電流對(duì)于MOS管來講是正向電流,電機(jī)反電動(dòng)勢(shì)在PWM關(guān)斷時(shí)間的伏秒數(shù) 大于 電源電壓在PWM開通時(shí)間加在電機(jī)上的伏秒數(shù),小于,那么電機(jī)會(huì)產(chǎn)生反向電流,使電機(jī)產(chǎn)生反向力矩,因?yàn)橹绷饔来烹姍C(jī)的力矩是正比例于電流的,反向電流就會(huì)產(chǎn)生反向力矩。
視這個(gè)電流的大小,電機(jī)就能減速或者剎車了。而且電機(jī)上的這個(gè)反向電流還會(huì)在PWM開通時(shí)間回饋到電源中去,做到了能量回饋。如果電源是二次電池,那么這是有好處的,如果不是電池的話,會(huì)使母線電壓升高,要做一些能量消耗的措施。
說白了,就是你的PWM占空比就能控制電機(jī)的轉(zhuǎn)速,電機(jī)的轉(zhuǎn)速會(huì)跟隨的你PWM占空比變化,你的占空比加大,電機(jī)就會(huì)加速,你的占空比減小,電機(jī)就會(huì)減速,你減得快,就相當(dāng)于剎車,如果控制得好,可以做到很迅速但是又很柔和的剎車效果。
但是如果你的占空比突然減到0,就相當(dāng)于把電機(jī)短路了,這是急剎車,會(huì)不會(huì)損壞要看電機(jī)的內(nèi)阻,功率,慣性,還要看功率管的過載能力。當(dāng)然還考驗(yàn)電機(jī)的機(jī)械強(qiáng)度,因?yàn)檫@種剎車從表面上看,就好像直接用硬物把電機(jī)卡住的效果差不多,發(fā)出的聲響也是十分巨大的金屬聲。
當(dāng)然,還有更急的剎車辦法,就是把電機(jī)切換到反向運(yùn)行狀態(tài),但是這種方法是有很大的隱患的,往往會(huì)造成器件損壞。
不過話又說回來了,那種受限單極PWM調(diào)制方法,只能使用這1種剎車或減速模式,既沒有好的效果,又容易損傷器件。
所以如果需要電機(jī)帶剎車的話,盡量使用單極調(diào)制或雙極調(diào)制,不要使用受限單極調(diào)制模式。
一般電動(dòng)輪椅的電機(jī)都是采用這種模式控制的。
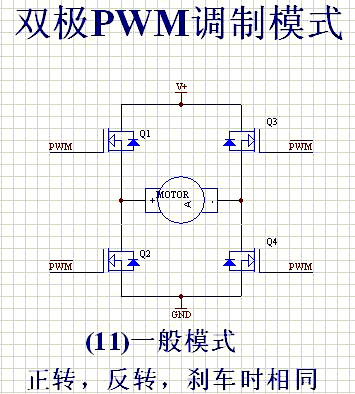
雙極模式:
雙極模式,只有H橋一種接法,而且4只管子同時(shí)工作。如圖11
斜對(duì)角的兩個(gè)管子通相同相位的信號(hào),如Q1和Q4,而另外兩只管子用與之互補(bǔ)的信號(hào)驅(qū)動(dòng)。在PWM導(dǎo)通器件,電機(jī)兩端的驅(qū)動(dòng)電壓是正的,在PWM關(guān)斷器件,電機(jī)兩端驅(qū)動(dòng)電壓是負(fù)的。
當(dāng)PWM占空比為50%時(shí),電機(jī)保持靜止?fàn)顟B(tài),當(dāng)PWM占空比大于50%時(shí),電機(jī)正轉(zhuǎn),當(dāng)PWM占空比小于50%時(shí),電機(jī)反轉(zhuǎn)。
其實(shí)當(dāng)占空比為50%時(shí),電機(jī)并不是靜止的,而是在原地抖動(dòng),因?yàn)殡姍C(jī)上的電流也是一個(gè)交流的,這個(gè)抖動(dòng)能有效克服電機(jī)的靜摩擦,使電機(jī)能快速啟動(dòng),迅速反應(yīng),適用與需要?jiǎng)討B(tài)性能好的場(chǎng)合,比如說,光驅(qū)里面控制光頭前后移動(dòng)的電機(jī),直流伺服電機(jī),還有就是現(xiàn)在匠人正做的那個(gè)二輪小車驅(qū)動(dòng)車輪的電機(jī)也適合用這個(gè)方法來驅(qū)動(dòng)。
當(dāng)然了,單極和雙極調(diào)制也可以把4只管子都關(guān)斷,使電機(jī)自由減速,而不是靠方向力矩來進(jìn)行減速。
〈烜芯微/XXW〉專業(yè)制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以直接聯(lián)系下方的聯(lián)系號(hào)碼或加QQ/微信,由我們的銷售經(jīng)理給您精準(zhǔn)的報(bào)價(jià)以及產(chǎn)品介紹
聯(lián)系號(hào)碼:18923864027(同微信)
QQ:709211280